About Me
PhD in Autonomous Robotics and Neural Network Architectures from Indian Institute of Technology, Kanpur, India (IIT Kanpur), Supervisor Prof. Laxmidhar Behera. My research interests are Space Robotics | Autonomous Drones and Vehicles | Machine Vision | Neural Network Architectures | Machine Learning | Deep Learning. I specialize in developing visual perception algorithms | neural network architectures | GPU optimizations | Developing hardware systems including electronics. Please see CV for more details.
CV Publications RoboticsNews
2024
- Feb: A paper on Fast-Fruit-Detector got accepted to IEEE Robotics and Automation Letters (RA-L), 2024.
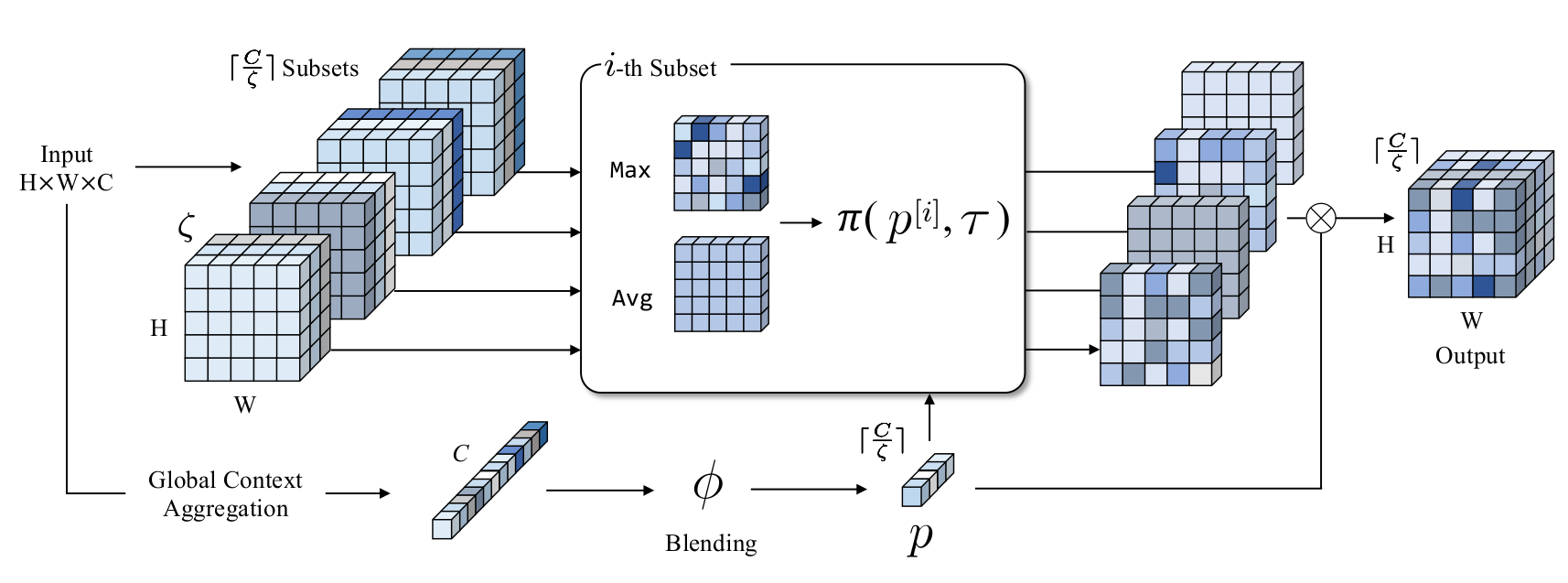
- Feb: PiX: Dynamic Channel Sampling for ConvNets got accepted to Computer Vision and Pattern Recognition (CVPR), 2024.
- Jan: Jetson-SLAM is accepted to be presented at International Conference on Robotics and Automation (ICRA), 2024.
2023
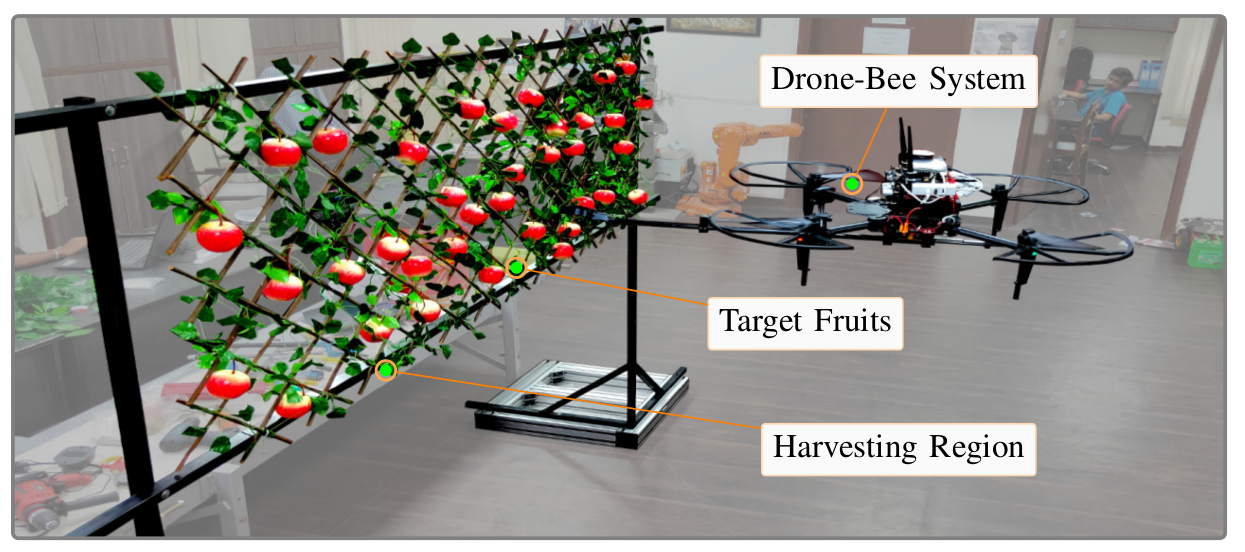
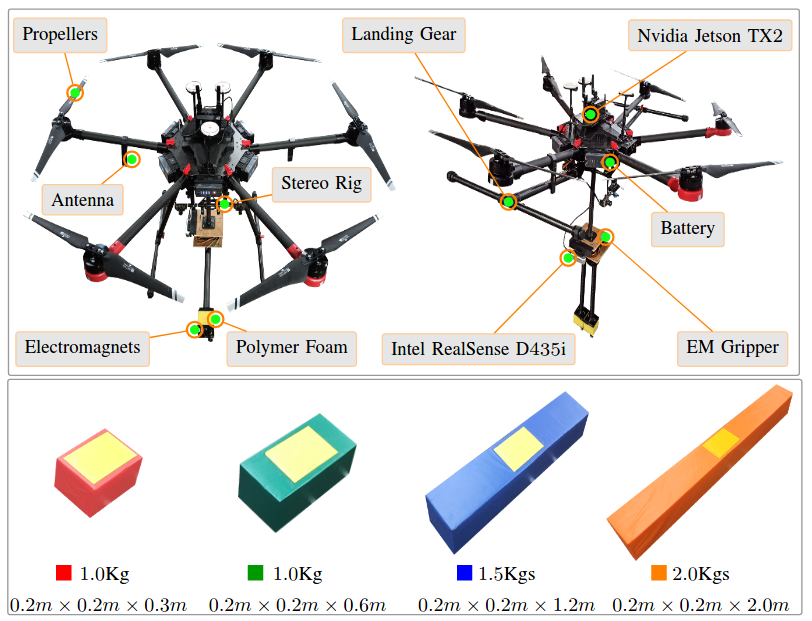
- Dec: A paper on the autonmous fruit harvesting UAVs (DroneBee) got accepted to IEEE Robotics and Automation Letters (RA-L), 2023.
- Dec: Defended PhD Thesis.
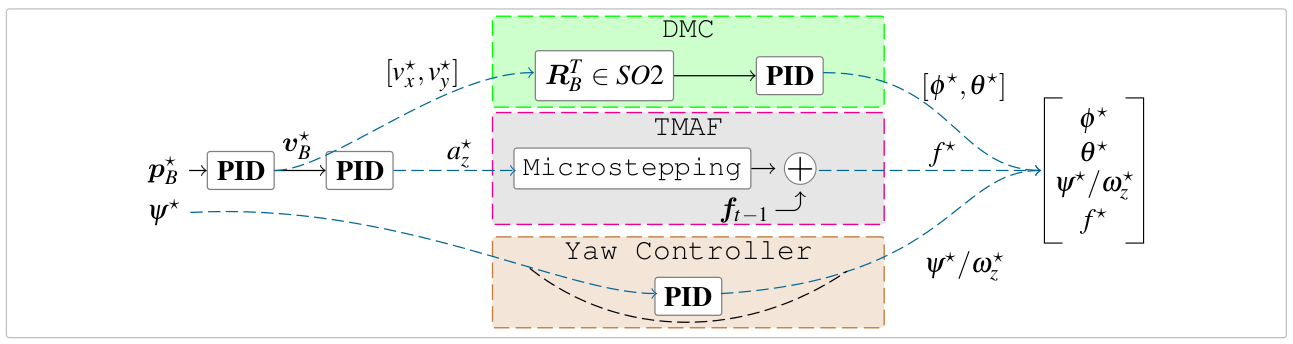
- Nov: A paper on gravity agnostic thrust microstepping control (TMDC) got accepted to IEEE Robotics and Automation Letters (RA-L), 2023.
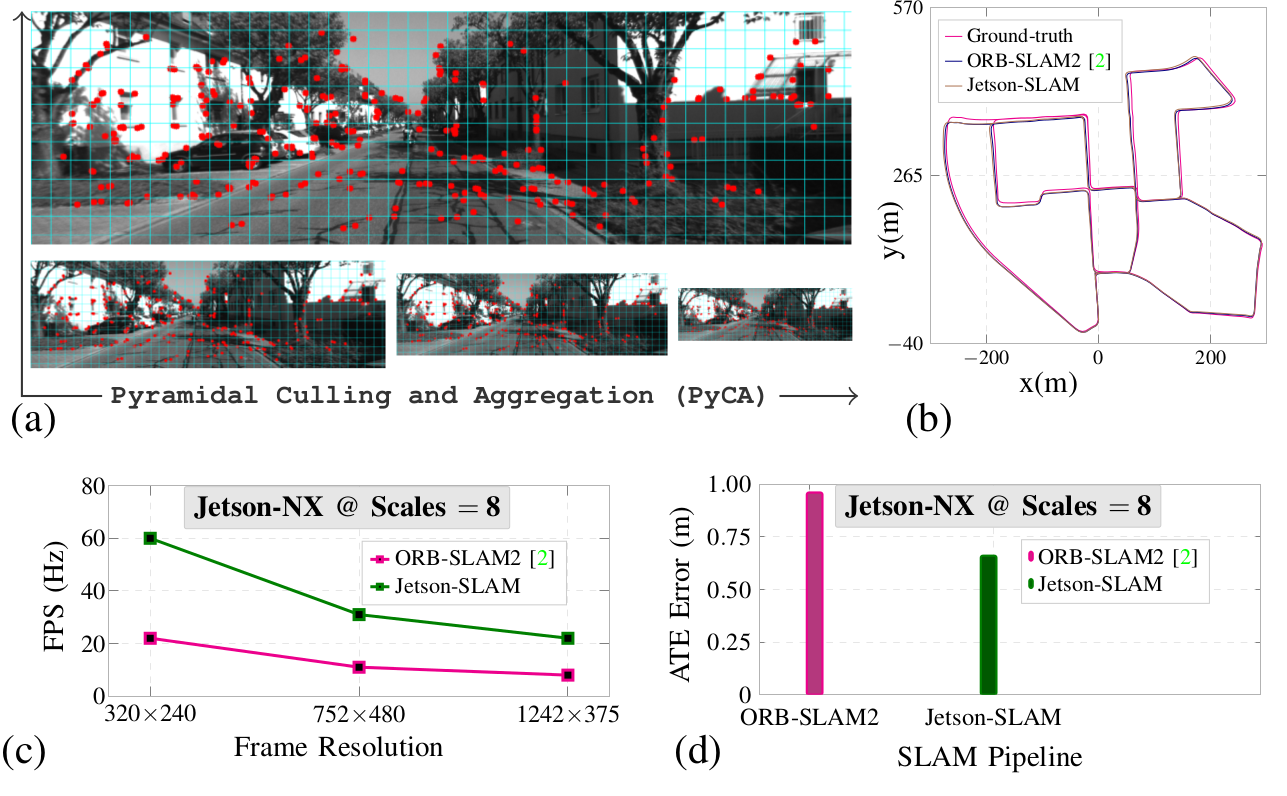
- Oct: A paper on GPU-accelerated high-speed stereo visual SLAM (Jetson-SLAM) got accepted to IEEE Robotics and Automation Letters (RA-L), 2023.
- Jun: Presented open seminar of my PhD research. Please watch the Teaser Video of my research.
2022
- May: Our team in DJI Robomaster challenge ranked 3rd worldwide.
- Jan: DeepMI: A Mutual Information Based Framework For Unsupervised Deep Learning of Tasks (arXived).
- Jan: I am mentoring undergarduates at IIT Kanpur for DJI Robomaster University AI challenge, 2022.
2021
- May: One paper got accepted to International Conference on Systems, Man, and Cybernetics (SMC), 2021.
2020
- Oct: I'll present state-of-the-art seminar of my PhD research.
- Jun: Our work on challenge-2 of pick-transport-place using UAVs in MBZIRC 2020 has been accepted to International Conference on Intelligent Robots and Systems (IROS).
2019
- Jul: I will serve as computer vision and electronics system lead for challenge-2 of pick-transport-place using UAVs in MBZIRC 2020, Abu Dhabi.
- Jun: One paper got accepted to International Conference on Intelligent Robots and Systems (IROS).
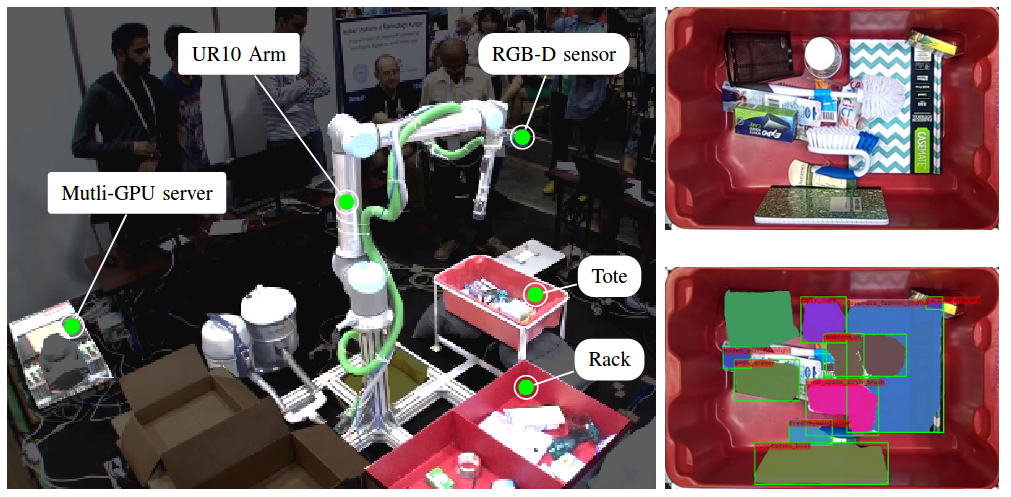
- Jan: Our vision system for Amazon Robotics Challenge 2017 has been accepted to International Conference on Robotics and Automation (ICRA), 2019.
2018
- Aug: I have received IROS, 2018 SDC travel award to attend IROS conference.
- Jul: I am joining as PhD student at IIT Kanpur in Robotics with Prof. Laxmidhar Behera.
- Jun: One paper on textured 3D maps of cities using autonomous vehicles is accepted in International Conference on Intelligent Robots and Systems (IROS) 2018.
2017
- Jun: We ranked 3rd, 4th, 5th worldwide in pick-task, stow-task and pick-cum-stow task among teams MIT, Princeton, Delft, in Amazon Robotics Challenge 2017.
- Jan: I will serve as computer vision and electronics system lead in team IITK-TCS for Amazon Robics Challenge 2017, Leipzig, Germany.
2016
- Sep: I have joined with Prof. Gaurav Pandey on Autonomous Driving Project funded by FORD autonomous driving, california, USA.
- Aug: I have defended my M.Tech. research which served as visual perception system in Amazon Picking Challenge 2016.
- July: We ranked 5th worldwide among teams MIT, Princeton, Delft, in Amazon Picking Challenge 2016.
2015
- Dec: I will serve as computer vision and electronics system lead in team IITK-TCS for Amazon Picking Challenge 2016, Leipzig, Germany.
2014
- Jul: I am joining as masters' student (M.Tech.) at Indian Institute of Technology, Kanpur in Robotics.
Publications
Please visit my Google Scholar for full list
2024

2023
2022
DeepMI: A Mutual Information Based Framework For Unsupervised Deep Learning of Tasks
arXiv, 2022
Paper
2021
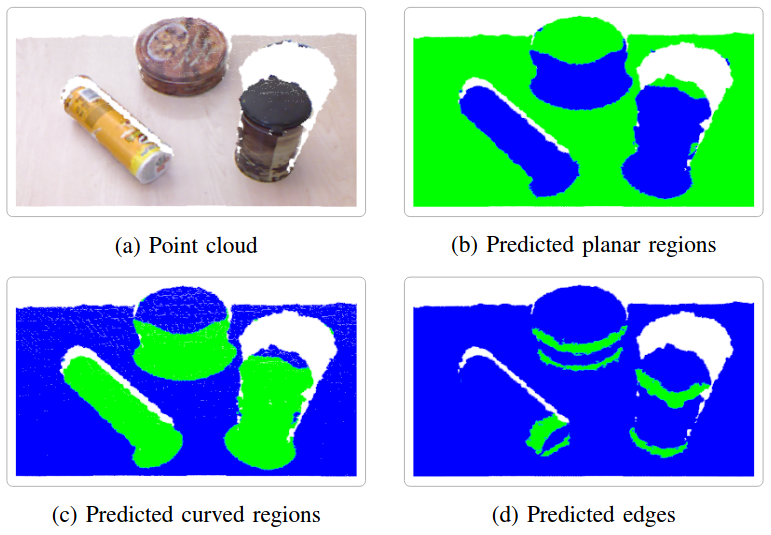
End-To-End Real-Time Visual Perception Framework for Construction Automation
International Conference on Systems, Man, and Cybernetics (SMC), 2021
Paper
2020
2019
2018
